

Descripción
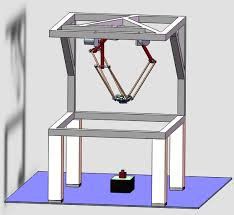
Es un manipulador con estructura de Mecanismo Paralelo con tres grados de libertad. Estos Mecanismos poseen una plataforma fija y otra móvil.
Los actuadores están montados en una plataforma fija, reduciendo el cableado y manteniéndolo fuera del espacio de trabajo .La plataforma móvil es el elemento efector y puede ser posicionada en un amplio espacio de trabajo con elevada precisión y repetibilidad.
La estructura del manipulador es ligera, simplificando la dinámica y minimizando el paso a desplazar. Lo anterior permite utilizar el par generado solo era el desplazamiento de la carga.
El controlador se alimenta con 120 VCA, las señales de control se envían desde una PC por medio del puerto USB. Una interface gráfica, que funciona bajo Windows XP. Permite la interacción con un usuario y la programación de desplazamientos del manipulador.

Aplicaciones
- sector educativo.
-Carga / descarga de objetos.
-Ensamble de partes.
-Posicionamiento de muestras.
-Barrenado sobre metales blandos.
-Didáctica, enseñanza de robótica.
Metodología
Amplio espacio de trabajo, Estructura ligera de aluminio. Elevada repetibilidad y precisión, Capacidad de carga de 1.5 kg. Cableado fuera del espacio de trabajo.

Investigador
Dr. Eduardo Castillo Castañeda
CENTRO DE INVESTIGACIÓN EN CIENCIA APLICADA Y TECNOLOGÍA AVANZADA DEL INSTITUTO POLITÉCNICO NACIONAL
CICATA Querétaro, Cerro Blanco No.141 Col. Colinas del Cimatario, C.P. 76090
Querétaro, Querétaro MÉXICO
Teléfonos: 01 (442) 2290804 Ext. 81035